ARUMO-SiR07M・腕を作りなおしている理由
すいません m(_ _)m、本記事はブログ引越時に書式が崩れました。順次修正中です。
ROBO-ONEのレギュレーションを読み直していて、ミスに気が付き、へこみながら腕を作りなおしています。さてさて、そのへこんだミスというのは…。
新型機(と、いつまでも書いているのも変なので、開発コードはARUMO-SiR07Mとします)の肩は、下の写真のように、直交軸構造になっています。Pirkus-R Type01の脚をイメージしてもらえればよいかと思います。そのため、通常状態はこんな感じでコンパクトに収まっているのですが…。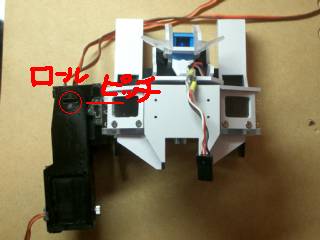
腕を上げると、下側の突起部分が残ります。で、ROBO-ONEのレギュレーションをよく読むと…「ここで腕の長さとは胴体から離れて動く部分の最大の長さを言う。」とあります。これを素直に解釈すると、下の写真のように、下側の出っ張りも計測対象に入る事になります。2cmほどですが、軽量機でこの長さの差は非常に大きいと思います。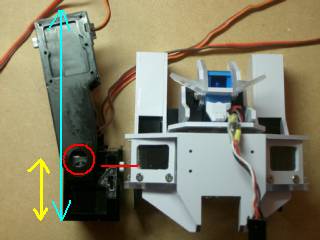
あれ?黄色い線ってなんだっけ?時間も無いので無視してください。
これを計測対象に入れるのは殺生な…という感じもしますが、ここを使って攻撃できる機体もあるでしょうから、まあレギュレーションはレギュレーションということで受け入れることにして、設計変更しています。
いい構造だと思ったんだけどなー。残念。まあ、今、気がついただけでもよかったということで。会場で気がついたら悲惨ですから。


 SiSO-LAB所長兼研究員のSiSOです。あ、趣味のサイトなので実体はありませんけど…。
SiSO-LAB所長兼研究員のSiSOです。あ、趣味のサイトなので実体はありませんけど…。

















え゙、そうなんですか!?
Assoもヒロムロボも稼動軸からサーボを逃がす(軸は軸、サーボは外からそれを稼動)ために肩が上や後ろに大きく張り出しているのですが...