テオ・ヤンセン氏機構のもどき工作
すいません m(_ _)m、本記事はブログ引越時に書式が崩れました。順次修正中です。
なんと書いてよいのかわからなかったので、ほどほどに失礼のない程度に「テオ・ヤンセン氏機構」と書いてみましたが、テオ・ヤンセン(Theo Jansen)展で話題になっているあれです。すごく不思議な、また、蹴り上げるところとか妙に生々しい動きをする作品だなぁ、と思ってみていたのですが、テオ・ヤンセン展に行きたいけど行けないパワーで、もどき作品を作ってみました。
■テオ・ヤンセン氏機構の採寸
とりあえずネットに上がっている情報や動画を集めて採寸しました。せっかくなので、実際に動いた方が楽しいだろうと思い、タミヤのクランクギヤーボックスを使うことにしました。というわけで、採寸した情報を元に、付属のクランクサイズに合わせて寸法を変更し、適当に細かな数値を丸めたのがこれです。元ネタは、YouTubeにアップされていた動画です。(http://www.youtube.com/watch?v=-GgOn66knqA) 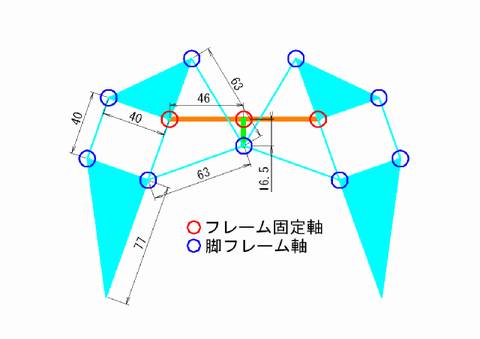
■フレーム素材、材料など
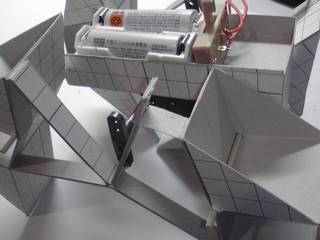
フレームは何でつくろうかな、と思ったんですが、CAD上でちょっと検討してみたところ、かなり平行リンク部分がつぶれることがわかったので、ユニバーサルアームなんかだとお互いが干渉してちょっと苦しそうです。薄さに期待して、工作用紙で作ってみることにしました。 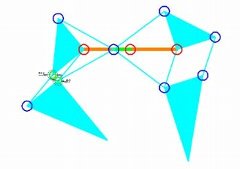
工作用紙、初めてのマシーン開発時にサーボレイアウト検討に使って以来ですが、貼りあわせるとかなり強度が出ます。接着剤によっては相当なものになります。今回は手軽にスティックのりを使っています。 また、軸は竹串を使っています。
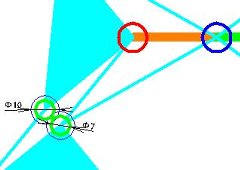
ところで、タミヤのクランクギヤーボックス、以前から不思議に思っていることがあります。欲しいのは180度ずれたクランクなのですが、組み立てるとなぜか180度ずれた状態になりません。 

拡大した写真を見ると180度から少しだけずれていることがわかるかと思います。これって、なんでなんでしょう???
工作用紙についてですが、厚みが約0.5mmあります。最初は厚みを意識して図面考えていたんですが、よく考えてみたら、あまり細かな図面を引いてしまうと、せっかくの方眼が役に立たなくなってしまいます。そんなわけで、結局、あまり考えずに、なるべく方眼目にそって、あとは基本図面を見ながら適当に現物合わせで作りました。工作用紙の枚数は、失敗した部品もあったので正確ではありませんが、2枚使いました。思ってたより使いました。
■歩行テスト
クランクギヤーボックスは、構造上、モーターが入っているとクランクを手で回すことができませんので、まずはモーターだけ外して手で回してみました。なんとなく脚を蹴り上げるところで、「カックン、カックン」と動きます。フレーム部品精度の問題なのか、平行リンク部の軸が、単に紙を折り曲げただけで作っているせいなのかはよくわかりませ。ちょっと前後の脚が干渉するものの、ちゃんと回りました。で、触っていて不安になってきたのが、前後バランスです。脚が4本なので、前後バランスが悪いと歩行中に倒れてしまいそうです。これについては、電池ボックスの搭載位置で調整することにして、モーターで歩行させてみることにしました。 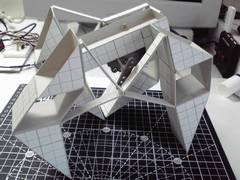

とういわけで肝心の歩行ですが、初起動したとたんに破損しました。 いや…
破れました。
写真に写っている部分の反対側の脚も破れています。左右共にこちら側(後ろか前か決めていないので微妙な書き方ですいません)が破れました。興味深い事実です。
紙なので、テープですぐに補修し、再起動したところ、残念ながら、手で補助せずして歩行はできませんでした。電池の場所を動かして、なんとかそれなりにバランスするところを探してみたのですが、ダメでした。もうちょっと工夫が必要です。それでもなかなか奇妙に気色悪く動きます。ひょっとしたら、動きから来る「不気味の谷」っていうのがあるのかもしれません。脚運びが妙に生々しいと言いますか(自画自賛状態?)。 というわけで、Ropotalに動画アップしたので、こっちも埋め込みでリンクしておきます。
もうちょっと考えてなんとか歩かせたいなって思うのと、あとは外観についてなんですが、なんとなく、
「パイプの塊がワシワシ歩く」
のに感動していたりするので、なんとか安上がりにパイプで作れないものか、脳内妄想中です。
関連エントリ






 SiSO-LAB所長兼研究員のSiSOです。あ、趣味のサイトなので実体はありませんけど…。
SiSO-LAB所長兼研究員のSiSOです。あ、趣味のサイトなので実体はありませんけど…。

















Your Message