ふくらはぎまわりの組み立て
すいません m(_ _)m、本記事はブログ引越時に書式が崩れました。順次修正中です。
引き続き、ふくらはぎの組み立てです。日が変わる前にはアップできるかと思っていたのですが、設計ミスで日をまたいでしまいました。説明は後ほど。
使う部品は、あらかじめ接着で組み立てておいたふくらはぎフレームとスペーサーなどです(お、今回はサーボ無し)。今回は構成が簡単ですので、細かな組み立て途中の写真ははぶきます。でも、おまけで手修正の記録が入ってます。
まずはスペーサなどをフレームに組み付けます。で、先に組み立てた足先に組みつけてみると…あら、干渉して足首ピッチ軸が動きません。○| ̄|_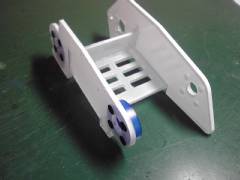
どうも、ROBO-ONE13thの新レギュレーションが発表されたときに設計変更したのが甘かったようです。足裏サイズ変更に伴い、足先部品の変更はしていたんですが、ピッチ軸部分の干渉をチェックするのを忘れていいました。
設計を再検討したところ、ちょちょっと小さくするだけで大丈夫そうなので、ジグを作って手加工することにしました。で、作ったジグが左の写真。これをフレームに固定して…

プラスチック加工用のニッパでパッキンパッキンします。あとはちょちょっとヤスリで整えればOK。わりと簡単に修正できました。ポリカはABSと比べると硬いせいか、ABSの時みたいに、パッキンパッキンしてもそのまま使えそう!という感じにはならず、ちょっとヤスリをかけてやらないと切り口があまりきれいじゃないです。

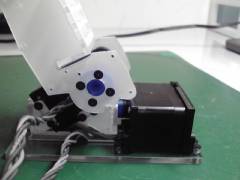
で、あとはハブをくっつけて、できあがりです。ケーブルの長さとかはとりあえずそのままにして、まずはこのまま組み上げていきます。全部組みあがったところで、ケーブルを調整する予定です。

それにしても、いつものことなのですが…作っているハナから、再設計したくなりますね。(^_^;


 SiSO-LAB所長兼研究員のSiSOです。あ、趣味のサイトなので実体はありませんけど…。
SiSO-LAB所長兼研究員のSiSOです。あ、趣味のサイトなので実体はありませんけど…。

















Your Message