FUTABA RS301用直行軸・わりといい感じ
すいません m(_ _)m、本記事はブログ引越時に書式が崩れました。順次修正中です。
スローペースですが、RS301用サーボジャケットをベースにした直交軸、だいたいできてきました。
まずは、作った部品はこんなものです。左の部品は3mm厚、右の部品は2mm厚です。右の部品、見ていただければわかるように、はめ込みになっています。

例によってセルフクリンチングフラッシュナットをはめ込みます(2mm厚用のセルフクリンチングフラッシュナットを使っています)。で、サーボジャケットへ接着します。


そして装着します。2mm厚パーツのはめ込みは、このサーボ(ピッチ軸側といえばいいかな?)に装着するときに、脱着可能にするためのものです。上下のサーボジャケットを接着してしまうと、サーボからはずせなくなってしまいますので…。左の写真が前側、右の写真が後ろ側です。

そして3mm厚側に、もう1つのサーボを結合します。もう1つの方は、サーボジャケットを上側だけ使い、M1.7×27のネジで一緒に固定します。いい感じです。剛性感も悪くありませんし、メンテ性も悪くない感じです。

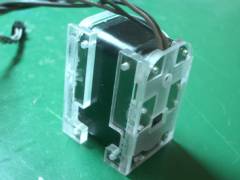
というわけで、さっそく改良点発見…。いつもながら、どうして事前に気づかないんでしょう?下の写真は下側(G-ROBOTS GR-001で言うと足首の方の直交軸の向きで考えてください)ですが、ケーブルの出し方ですが、やっぱりサーボの結合部分から両方とも出るようにした方がいいですよねー。3mm厚の部品に溝をいれてやるだけでできそうなので、ちょっとやってみます。


 SiSO-LAB所長兼研究員のSiSOです。あ、趣味のサイトなので実体はありませんけど…。
SiSO-LAB所長兼研究員のSiSOです。あ、趣味のサイトなので実体はありませんけど…。

















なかなか良い感じですね。見た目ではちょっと結合部の強度が心配ではありますが。
ケーブル出しも出来れば結合部から出したいですね。それと、私の場合(?)直交軸の軸は脚が長くなるように、足首は下側で股関節では上側に配置するので、ケーブルの出し方も変わってきます。写真のケーブルの出し方だと、股関節向きですね。結合部から出るとして、上方向下方向両方から出せると良いと思うのですが。