ROBONOVA-Iカスタマイズ計画
すいません m(_ _)m、本記事はブログ引越時に書式が崩れました。順次修正中です。
ROBONOVA-Iカスタマイズ・構想中
ROBONOVA-Iの方ですが、ぼちぼちっと研究やROBOBASICの調査、部品発注なんぞしています。名前も考えたんですが、友達にメールしたら反応がイマイチだったので、再考案中…。
まずはパッケージから紹介します。って、ネットではあちこち出てますので詳細は省きますが、取っ手がついてていい感じです。実はこっちが裏側というのを最近知りました。反対側はとてもクールなデザインです。
で、中身はこんな感じです。せっかくなので、部品を全部並べてみました。マニュアルは紙でちゃんと入っています。最近はほとんどCDなどで、というパターンが多いので、このあたりは一般消費者受けいいんじゃないかなって思います。


各イベントへの参加を考えて、足の長さをROBO-ONE 11thレギュレーションに合わせようと思っています。そんなわけで、まずは足裏サイズの計測。ROBONOVA-Iの場合、プラスチックカバーが足裏サイズで、また、デザイン上のポイントにもなっていますので、そのまま使うことにします。計測結果は以下の写真の通りです。まあ、0.01mmぐらいは、誤差の範囲ということで、102x66mm、最大長104mmのようですね。
これをROBO-ONE 11thの軽量級(2kg以下)のレギュレーションで考えると、足裏サイズは脚の長さの60×30%、最大長が11cmとなります。そんなわけで、ROBONOVA-Iの場合だと、脚を伸ばした状態でだいたい20cmぐらい(モモのロール軸中心から足裏まで)ですから、縦、最大長は問題ありませんが、横幅に問題がでます。66mmとしたら、220mmの長さが必要になります。まずはこの部品はそのまま使うことにして、脚を220mmにしようと思います。

最大長はこのあたりかな。
とりあえず、まじめに考えるために、ROBONOVA-Iの図面をラフですが起こしてみました。マニュアルの写真(CAD図かな)からざくっと起こしたので、ミリ単位で違っているとは思いますが、アイデアを練るにはまあ十分かな、と。左がROBONOVA-Iで、右側が今回のカスタマイズプランです。
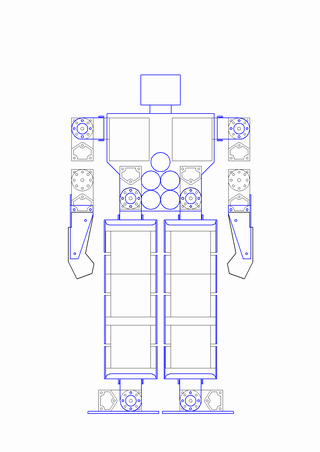
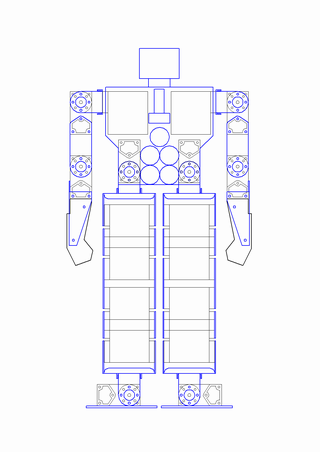
変更点は、腕を1cm伸ばしたことと、脚を2cm伸ばしてヒザをダブルサーボ化しています。まずはこれで作ってみて、どんなもんか、動かしてみようと思います。もしパワー不足だったら、あきらめて脚を短くし、足裏を削る事にします。
ROBOBASIC
というわけで、いきなりサンプルモーションが使えない状態になりますので、コントローラのお勉強を開始しています。とりあえず、簡単に、自分専用のベーシックプログラムを書いてみました。勉強ネタは、ハイテックのホームページや夢現工房にありますので、サンプルプログラムをダウンロードして眺めながらやっています。夢現工房に「ワイヤレスコントローラ対応改造パーツセット」をオーダーしたので、これのサンプルテンプレートを主に見ています。ワイヤレスコントローラのインターフェイスぐらいは自分で作ってもよかったのですが、今シーズンもやること盛りだくさんなので、作りたいのはぐぐっと我慢して、購入にしました。
ROBOBASICという言語が搭載されているのですが、これ、結構、学習要素が多くておもしろいですね。うちのACTION SCRIPTの最終形みたいな感じ。ハードウェア構成を考えると(シリアルEEPROMに載っている)、どれくらいパフォーマンスでるかな?ってちょっと心配だったりはしますが、すごくおもしろいです。
以前、BIS君が「プログラムする」と言っていた意味がわかりました。
ほんとにこれはプログラムです。ぱらぱら漫画にセンサ分岐いれるタイプとは違って、プログラム中に動作指示を織り込む感じで、とっても好みです(でも算術演算が無いのと時間管理はちょっと好きになれないかも)。タイプで分けるとすれば、きっとMotion Processorとかも、こっちに属するかな。ROBONOVA-Iはプログラム&制御学習向けに良いキットだと思います。
まあ、まだコンパイルしてませんが、ワイヤレスコントローラの同時押し対応とかのコードをぼちぼちと書いてます。

 SiSO-LAB所長兼研究員のSiSOです。あ、趣味のサイトなので実体はありませんけど…。
SiSO-LAB所長兼研究員のSiSOです。あ、趣味のサイトなので実体はありませんけど…。

















Your Message