ギンギン
すいません m(_ _)m、本記事はブログ引越時に書式が崩れました。順次修正中です。
先日のブログでちらっと書いた「ギンギン」について、詳細情報を頂いたので紹介します。写真でしか見た事がないのですが、コンパクトにまとまっていてとてもいい感じです。
ブログのカテゴリが「ギンギンといっしょ」というのもいい感じ。
「ギンギン」は、ROBOlepでブログを書かれているシロさんという方が製作されたロボットで、手のひらにのせれるぐらいの、とても小型のロボットです。名前は、アルミの色がシルバーなのでギンギンだそうです。このサイズでなんと24軸搭載!ほんとうによくまとまっていると思います。サーボは、サーボはHitecのHS65HB・MGで、バッテリーはプレン用の物を流用されているとのことです。
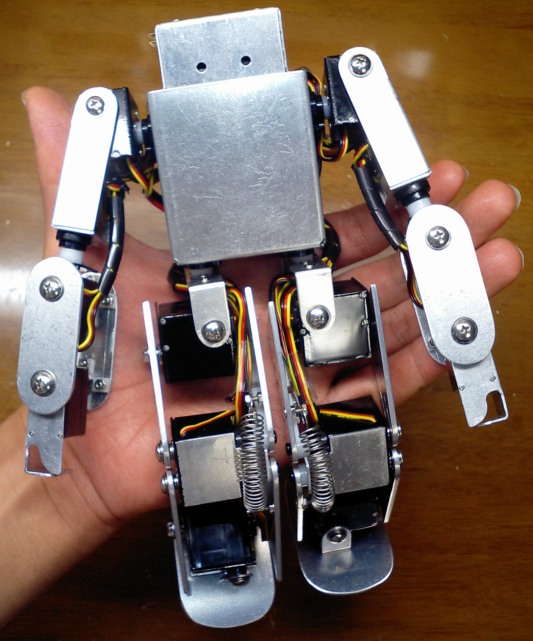
手のひらに載っています!(シロさんの手がすごく大きかったりして…)
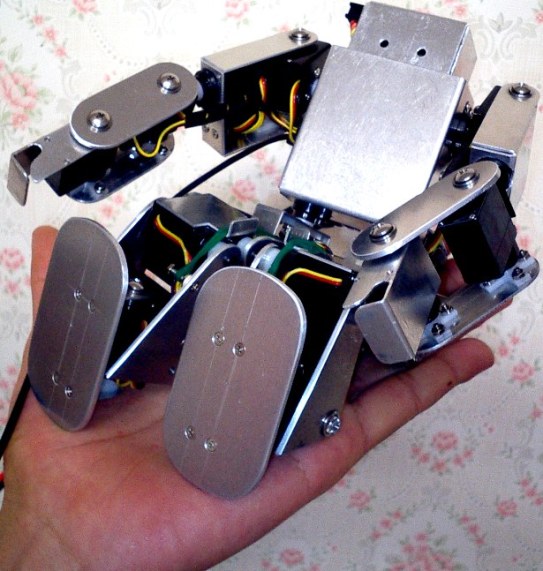
ひざの部分は、写真によってスプリングでアシストしてあったり、輪ゴム?でアシストしてあったりしますが、ダブルサーボになっています。また、フレームのデザインで、脚の各ピッチ軸が前後にオフセットされています(つまりまっすぐに伸ばしているけどちょっと曲がっている状態にできる)。ひょっとしたら、これで「ヒザを伸ばしたまま(ように見える?)歩いている歩行」にチャレンジしようとされているのかもしれません。また、なかなかの可動範囲を確保していると思います。
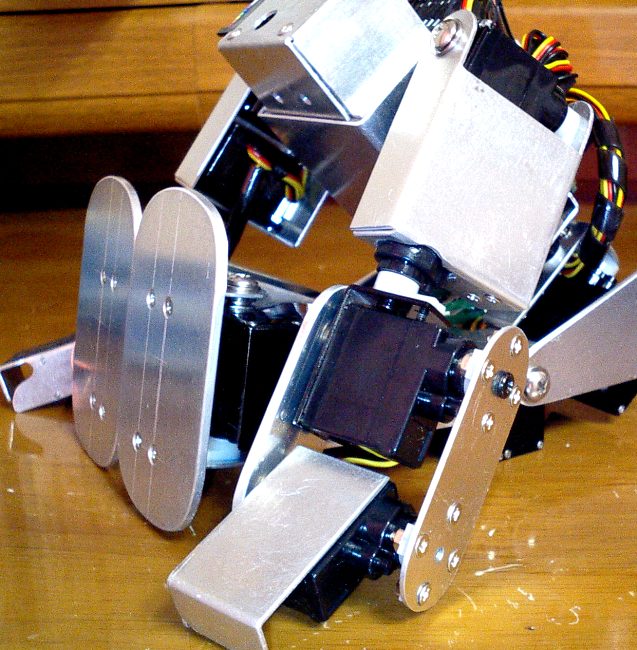

既にジャイロも搭載されているとのことで、重量は、バッテリー込みで600g以下、コントローラボードはVSTONEのVS-RC003を搭載されているとのことです。VS-RC003って52x48mmなので、ギンギンのサイズからいくと、胴体にギチっと入っていることになります。この「いいつめ具合」、わかっていただけますでしょうか?多分、シロさんは、VS-RC003のサイズ=正面から見たボディサイズというふうに決めたのではないかと…。
こんなにかわいいのを見せられちゃうと、ちょっと燃えます(萌えではありません)。ROBO-ONE終わったら、SISOもこれぐらいかわいいのを作るぞー!んで、EMMA-U0Aやギンギンと一緒に写真を撮ろう!(なんだかROBO-ONEで勝つということから、どんどん離れて行っている気が…)。

 SiSO-LAB所長兼研究員のSiSOです。あ、趣味のサイトなので実体はありませんけど…。
SiSO-LAB所長兼研究員のSiSOです。あ、趣味のサイトなので実体はありませんけど…。

















すいません。
萌えました