肩組み立て開始…
すいません m(_ _)m、本記事はブログ引越時に書式が崩れました。順次修正中です。
週末は家族で遊びに出ていたのですが、帰ってきてみてびっくり!のROBO-ONE開催日変更の話。この時期で前倒しはつらいです。onPCの方では、マジンガァが着地成功とのこと、さすがですねー。解説入りスロー映像とかを、次回のROBO-ONE DVDで入れてもらえるといいなぁ。
というわけで、いろいろとスケジュール短縮方法を模索しながら、まずはやることを進めることにして、肩の組み立てです。
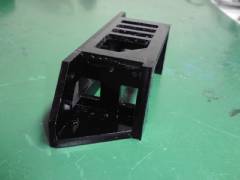
まず、使う部品はこんなものです。下の丸枠みたいな部品だけはPOMで作ってあります。ここは肩のピッチ軸フレームと当たる部分なので、摩擦を減らすのが目的です。
で、これをこんな風に接着し、さらにPOM部品も固定します。細かいところは脳内イメージでお願いしますね。(^_^;

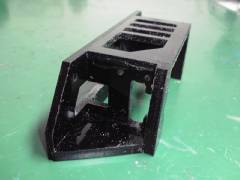
あとは、先日作ったアルミの部品をサーボにくっつけます。ここだけはサーボジャケットを使用しません。デザイン上、少しでもこのブロックを低くしたかったため、他とは異なる方法で固定することにしました。で、仮組みしてみたら、コネクタが通らないことが発覚!右下の写真の手前穴がその部分です。まあ、設計ミスってやつです。作り直すと時間がかかるので…リュータとかあれば楽なのになぁ、と思って、前に試した電動ドライバ+エンドミルでやってみたのですが、これぐらいの作業量になると、歯が立たず。
で、目をつけたのがPRX-1510のスピンドルモーター。クロステーブルの代わりに手で部品を固定して(持って)ぐりぐり。少々いびつになっちゃいましたが、なんとか穴拡張に成功。
なんだか最後の修正加工で疲れちゃいました。明日は上半身ブロックを組み上げます。

 SiSO-LAB所長兼研究員のSiSOです。あ、趣味のサイトなので実体はありませんけど…。
SiSO-LAB所長兼研究員のSiSOです。あ、趣味のサイトなので実体はありませんけど…。

















このようなブロック構造(?)は本当によく出来ていますね^^
しかもこれを2DCADで設計するとは・・・
大変、ファンシーな頭脳をお持ちですね!(笑)
私の場合、3Dを使っても無理な気が^^;