すごっ!
すいません m(_ _)m、本記事はブログ引越時に書式が崩れました。順次修正中です。
ニュースとか
ロポタルにて、CHERRY BOMBERさんの飛びロボ実験を発見!(ちょっと紹介が遅くなっちゃってごめんなさい) CHERRY BOMBERさん、すごいなぁ。最近、マクロスフロンティアを一生懸命観ていたSISOとしてはちょっとハマりました。何回も見直したり。実は以前、軽くラジコン用のファンとか調べていたんですけど、なかなか難しそうだなぁ、と手を出せず。
あと、今日ですが、Robot Watchにて、「1mクラスのロボットのバトルが始まる!~ヴイストン、「ROBO-PRO」に加入する2台の大型ロボットを発表」を読んでびっくり。そ、そういうサイズでしたか。たいしたもんです。
新型機構想
うちの方は、「1」は「1」でも、「1kg」の方ですね。最近、ちょっと余裕が出てきたこともあり、G-TuneF108Mは、まだバラバラだったりするので、脚周りから少しずつ改良パーツを加えて組みなおそうと思っています。ついでに、反対軸付きケースに変えてみようかと。軽量化にもなりますし、フレーム構造の簡略化もできそうです。
あとはARUMO-SiR07Mの方、重さに少々無理があるかなぁってところがあって、安心して動かせないので、安心してバリバリ動かせるスリムな機体を目指したいなぁって思ってます。そんなわけで、新型ARUMO-SiRは1kgを目指そうかなって思ってます。とりあえず設計図描いて妄想中。名づけて「タンデムツインサーボ構造」(バイクの前後にピストンをレイアウトするエンジン構造の名前から。バイクで二人乗りすることを「タンデム」と言いますが、前後に乗りますよね)。ヒザに使おうと思っているんですが、どうでしょう?
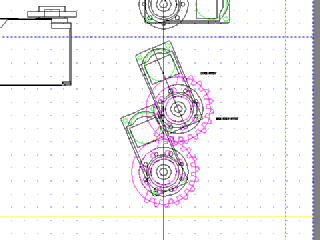
下側のサーボがひざ下のフレームに接続され、上側のサーボがギアを経由して下側のサーボをサポートします。動作速度は変わりませんが、トルク倍(実際には効率の問題で倍にはなりませんけど)ということになります。
利点としては、前後面から見た太さを抑えることができ、側面から見たときの太さを稼げて、しかもトルクが増えるというところにありるのではないかと。実は、ARUMO-SiRの太もも側面って、細すぎてイマイチ感があったので、ちょうどいい感じになりそうです。
それでも、デザインバランス上、オフセットする角度にはかなり試行錯誤してます。上の絵が、ようやく納得できた角度(細かなところにこだわりすぎ?)。
ギアはCNCフライスでフレーム一体で削りだす予定なので、加工精度から考えてバックラッシュ(ガタつき)が出ると思いますが、動作にはあまり関係ないと予想しています。もちろん、ぴったりギアがベストですが、下側サーボが基本的な動作をまかない、負荷によって角度ズレが発生したら上側サーボがサポートするような形になると思いますので。で、バックラッシュが大きかったら、身体を持ち上げる方向にきつくしておけば問題ないんじゃないかと思ってます。
全体構想としては、CPUはATMega128を使って、ソフトウェアはアプリレベルでG-Tuneと互換になるようにしてソフトウェアの開発効率を向上、で、サーボはPRS-DE07M系、ロングビスを使って部品点数減らしってな感じで考えています。
みなさんがROBO-ONEに向けてがんばっているところを読んだりすると、気持ちが焦っちゃったりすることもありますが、マイペースでがんばってます

 SiSO-LAB所長兼研究員のSiSOです。あ、趣味のサイトなので実体はありませんけど…。
SiSO-LAB所長兼研究員のSiSOです。あ、趣味のサイトなので実体はありませんけど…。

















Your Message