エレキット フォロ MR-9107、赤外線センサー付き6足歩行ロボット、対象年齢は10歳、SiSO-Jr.2、組み立てられるかな?
赤外線センサーで手のひらに近づいてきたり、物を避けながら6本の脚で歩くロボット、エレキットのフォロをSiSO-Jr.2用に購入しました。チャンレジ年齢(対象年齢)は10歳ということで、ちょうどSiSO-Jr.2も10歳なので、一人で組み立てられるかな?
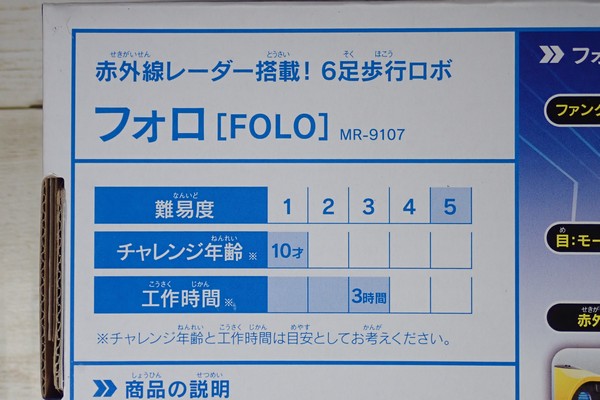
エレキット フォロ MR-9107、赤外線レーダー搭載!6足歩行ロボ
エレキットのフォロとは、イーケージャパンが販売している6足歩行ロボットの組み立てキットです。まあ、電動で動くプラモデルにマイコンやセンサーが組み込まれていると思っていただければよいかと思います。

どんな動きをする製品なのかは、エレキットのホームページを見てもらったほうが早いかもしれません。動画が掲載されていますので、歩行の様子や機能紹介など、わかりやすいです。

簡単には、方向転換(厳密には進む方向が変わるのであって方向転換するわけではないのですが…なかなか素敵な仕組みです)できる6足歩行機構に赤外線センサーを搭載しており、目を光らせながら対象物を追いかける(近づきすぎるとバックもします)「なかよしモード」と、赤外線センサーで障害物をよけながら進む「たんけんモード」を持っています。

エレキット フォロの対象年齢(チャレンジ年齢)は10歳。工作時間の目安は3時間
フォロは組み立てキットなので、プラモデルのように組み立てる必要があります。接着剤は不要ですが、ニッパーでライナーから切り離して組み立てていきます。チャレンジ年齢は10歳ということになっています。小学4年~5年生あたりになります。
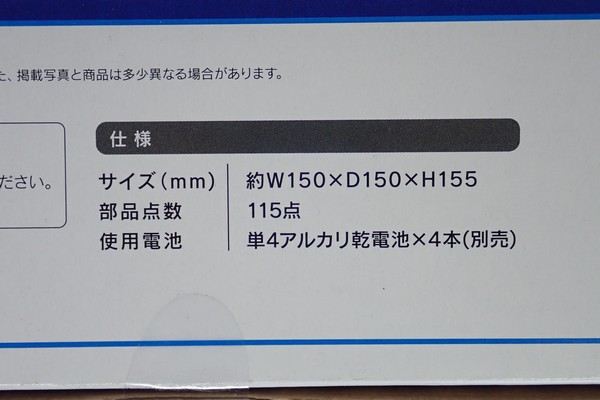
部品点数は115点となっており、組み立て後のサイズは約15cmです。また、使用電池は単4アルカリ乾電池4本となっており、別途購入する必要があります。
10歳のSiSO-Jr.2、エレキット フォロに挑戦。約1時間半で完成!
まずは開封の儀的レビュー!必要工具はプラスドライバー(サイズ:No.1)とニッパーだけ。ニッパーはプラモデル用が便利
というわけで、こういう組み立てもの大好きなSiSO-Jr.2、フォロを手にするや早速開封です。こういうもの(工作系と言いますか)を喜んでくれるのは、親としても何となくうれしいです。

箱はプラモデルみたいにパカっと上下に分かれるのではなく、手前から開くような構造になっています。
部品を並べてみました。6足ということだけあって、同じ形状の部品がたくさんあるのが特徴です。そんなわけで、部品点数の割には難しくなさそうです。

ニッパーとドライバーはミニ四駆で使っていたものを持ってきました。ニッパーは、タミヤ・クラフトツールズのモデラーズニッパーという、プラスチック部品の切り取り専用のものです。刃の形状が若干普通のニッパーと異なり、切り取った部分がきれいに平面になりやすくなっています。


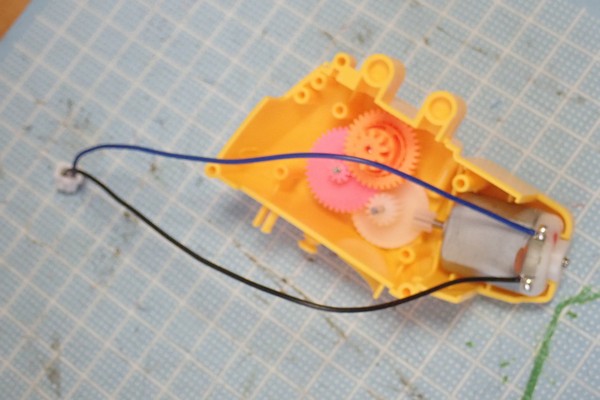
モーターや電池ボックスの配線はコネクタ処理済みで配線ミスは少なそう
「お、よく考えているな~」と思ったのが、モーターや電池ボックスの配線です。モーターの配線は色分け(青・黒と赤・黒)されており、さらに電線の末端はコネクタになっているため、工作が簡単になっています。

モーターには、たぶん、ノイズキャンセル目的だったと思いますが、セラミックコンデンサが付いています。一応、マイコン制御と思われるので、制御基板(マイコン)にノイズを流し込まないための対策と思われます。

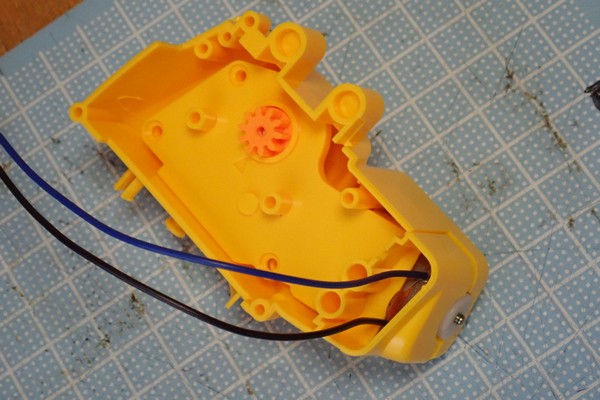
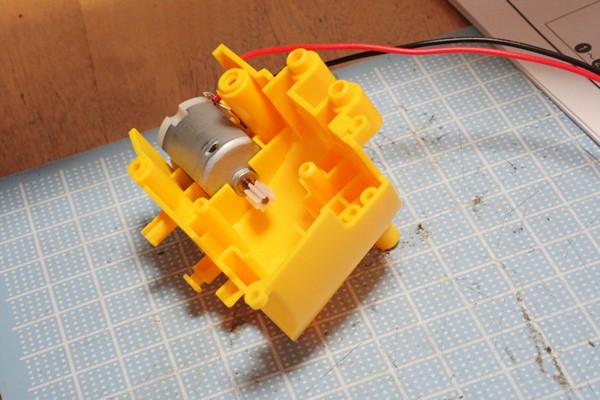
それでは歩行用・方向転換用ギヤボックスの組み立てから。これが一番わかりにくいかも
まずは歩行用のギヤボックスの組み立てです。ギヤは色分けされていますし、組み立て説明書も丁寧に書かれていますので間違えることは無いですが、シャフトなど、部品点数が多いのでちょっとややこしいところかもしれません。

青と黒の電線のついたモーターを取り付けます。ここでセラミックコンデンサを90度起こします。
で、1枚カバーを取り付けます。
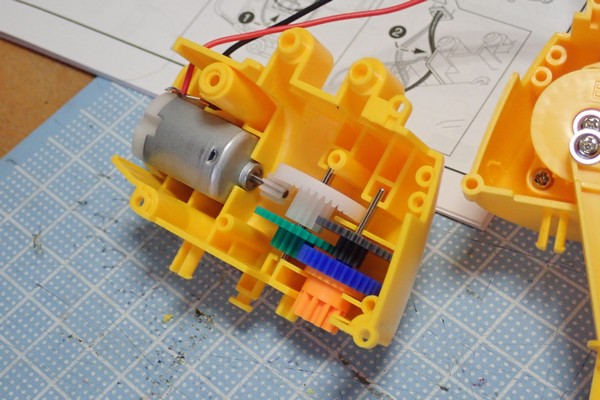
続いてクランク状に動くギアの取り付けを行います。位置決め用ジグがあるので、これを使ってギアを位置決めし、タッピングビスでギヤを固定します。
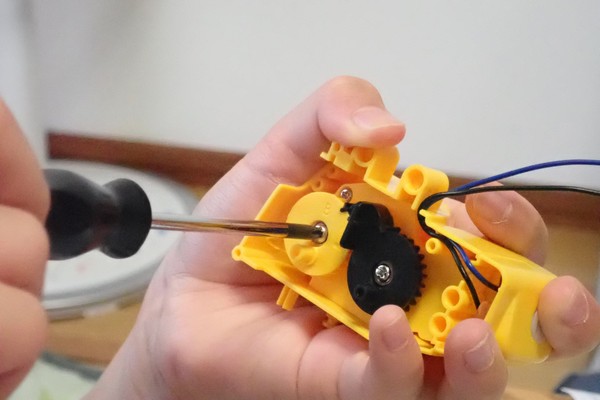
さらに歩行するための駆動力を伝えるパーツを取り付けます。これで歩行用ギヤボックスは完成です。
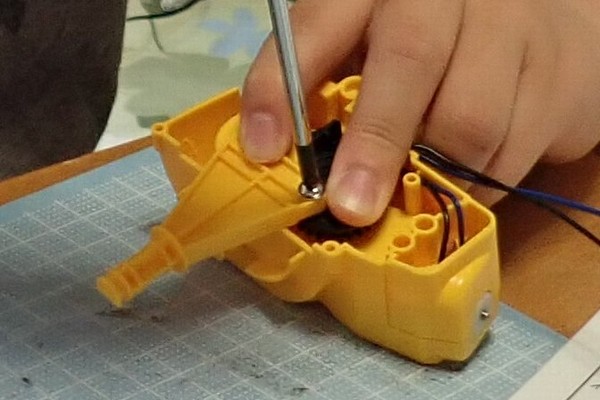
今度は方向転換用のギヤボックスを組み立てます。こちらは赤と黒の電線のついたモーターを使います。
こちらもギヤの枚数が多いですが、説明書通りにギヤをシャフトに通して取り付けていきます。SiSO-Jr.2、ここでちょっとオレンジ色のギヤの位置が分かりにくかったみたいで、ちょっと組みなおしていました。
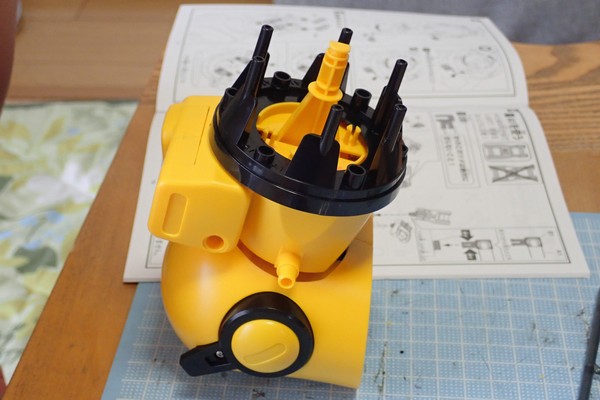
後は歩行用ギヤボックスと方向転換用のギヤボックスを結合したら、モーターとギヤ関係は完成です。ここはフォロの胸の部分になります。
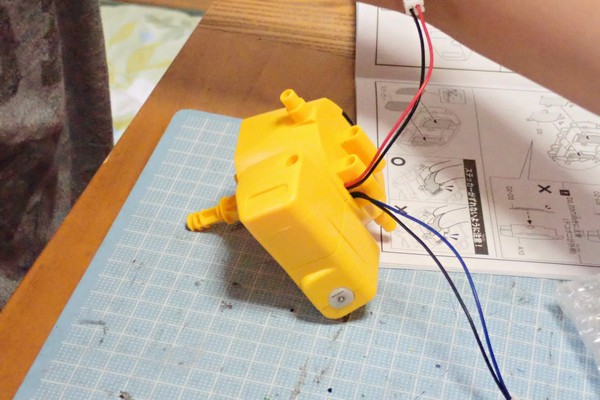
ビスは全部タッピングビスなのでちょっと押し込む、回すともに力が必要です。これだけはSiSO-Jr.2に教えました。また、SiSO-Jr.2が一番苦労していたところでもあります。

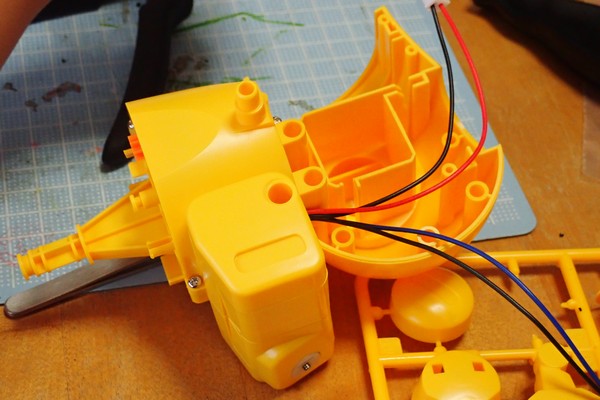
いよいよ頭部の組み立て。制御ボードを組み込むよ。赤外線センサは2組の模様
胸パーツに頭部パーツを取り付けていきます。
顔はクリアパーツなのですが、その内側に目っぽっくLEDで光る部分があります。LEDは制御ボードについているのですが、目がきれいに光るため、クリアパーツにシールを貼ります。

さて、普通のプラモデルにはない、制御ボードです。この写真の向きでフォロの顔の中に入るようになっています。中央下に電子ブザーのようなパーツが見えますね。
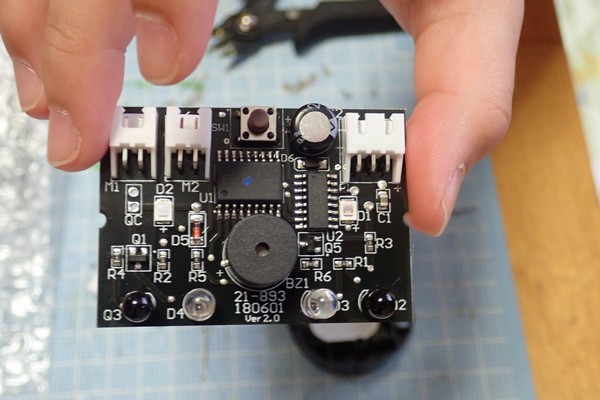
多分ですが…主要パーツは以下のようになっていると思われます。
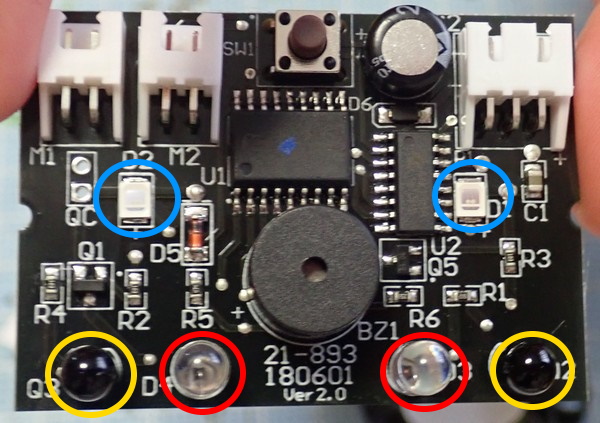
- 青丸…目用青色LED
- 赤丸…赤外線センサー用LED
- 橙丸…赤外線センサー
赤外線センサーは左右それぞれに組み込まれています。恐らく、例えばなかよしモードの場合、右の赤外線センサーが反応すれば右側ターン、両方とも弱く反応したら前進、強く反応したらバックするようになっているのではないかと思われます。
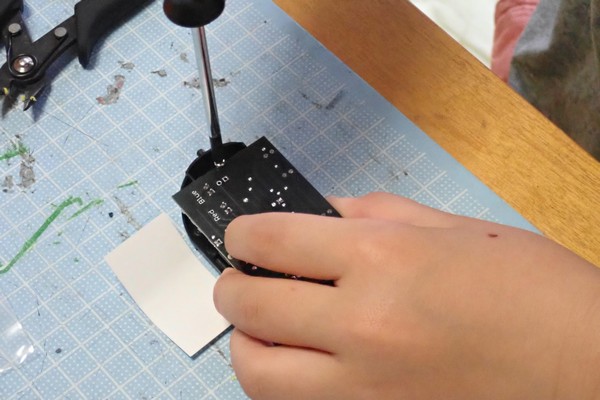
で、この制御ボードを顔面パーツに取り付けます。
ここで単4アルカリ乾電池も組み込んでしまいます。
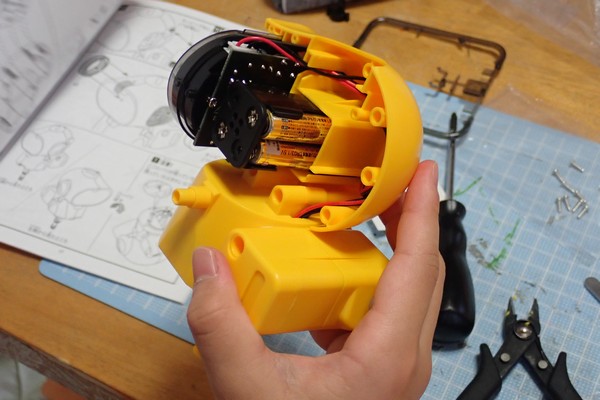
今回は、100均ショップ・ワッツで購入した5本セットのアルカリ乾電池を使いました。1本余りますが、動かしているうちに電池が無くなって、何度かアルカリ乾電池を再購入しているうちに使っちゃうでしょう。

で、頭部を閉めてしまいます。電池交換はこの部分のビスを外してやればできそうです。

これで胸から上が完成しました。後は足を組み付けるだけです。

足は3本ずつ1組になっていて上半身の向いた方向に歩くような構造
足のベースとなるパーツを取り付けます。
足は3本1組になっていて駆動するようです。完全によくは理解できていませんが、なかなか巧妙な構造のようです。

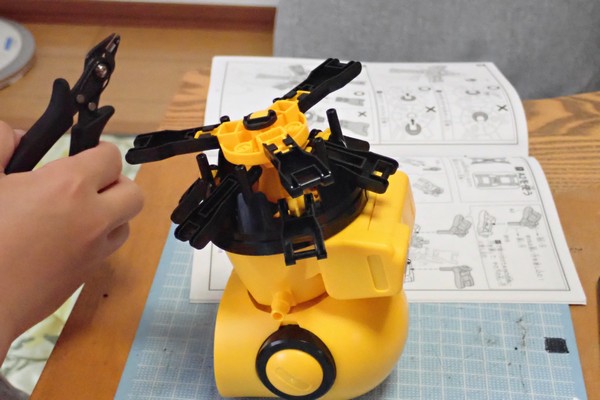
足の取り付けは本体をひっくり返した状態で行います。今取り付けているプレート状の部品は、上半身からきている歩行駆動パーツとつながります。既に黒いパーツが追加されていますが、裏表を間違えないようにする必要があります。

プレートはこんな感じで半固定されます。こういう構造なので上半身は自由に回転できるんですね。

プレートを拡張するようなパーツをはめ込んでいきます。

それにしても説明の難しい楽しい構造です。
なんと説明してよいのやら。自分もしっかりは構造を理解できていませんが…よく考えるな~と思います。

タッピングビスで固定します。ここもSiSO-Jr.2にとってはちょっと苦労するところです。

足のつま先?パーツです。ここははめ込みなので簡単に組み立てることができます。
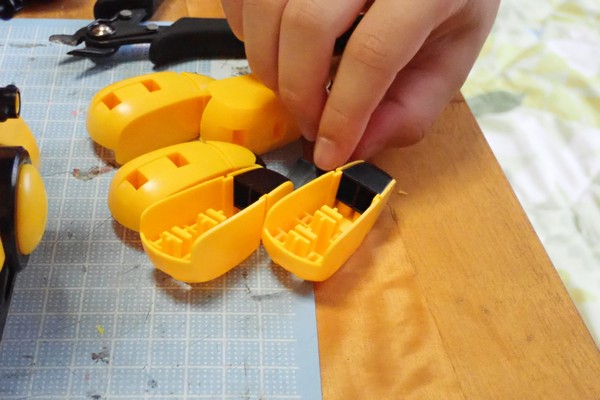
こんな感じで、根元の軸が稼働する並行リンクのような風に取り付けられます。

つま先を6本取り付け、腕(腕は電動では動きません)を取り付けたら完成です。

無事完成!早速遊んでみる。起動スイッチはおでこにあるよ
起動はおでこにある押しボタンスイッチを長押しします。

お、起動した!

手を見つけると近づいてきます。なかなかワシャワシャと足が動いて楽しいです。SiSO-Jr.2も大喜び。

手を近づけていくと、今度はバックします。

手を横に動かすと、動かしたほうについていきます。なかなかかわいいやつです。

たんけんモードのほうは、後で図鑑とか並べて試してみれば?と声をかけたのですが、ついてきたりするだけで充分面白いみたいで、とりあえず今日のところは、なかよしモードをメイン、テーブルの下なんかをたんけんモードで歩かせて遊んでいました。
 |
エレキット フォロ MR-9107 – amazon.co.jp 通信販売であれば有名どころのamazonでも取り扱っています(記事公開時情報で、送料込みで定価よりは安いです)…が、今はヨドバシカメラのほうがさらに安いです。 |
今日の一言二言三言
- プラスチック用ニッパーがあるとすごく便利
- なかなか巧妙な仕組みで自由な方向に6足歩行
- 電装系はコネクタ付きで失敗知らず
SiSO-Jr.2、結局、目安の工作時間3時間よりも早く、1時間半で完成させてしまいましたが、ニッパーがプラモ用というのも時短にだいぶ貢献していると思います。
それにしても自由自在な方向に進むことのできる6足歩行、なかなか巧妙な仕組みで興味深いです。






 SiSO-LAB所長兼研究員のSiSOです。あ、趣味のサイトなので実体はありませんけど…。
SiSO-LAB所長兼研究員のSiSOです。あ、趣味のサイトなので実体はありませんけど…。
















全く関係無いですが、ミニ4駆の方はもうしないのでしょうか?